トップ画像は記事とは何も関係がない、先日行った九州旅行で撮影した桜島とフェリー。
こんにちは。
うちのロードスターもいろいろ整備・改良し、いよいよエンジンを触らんとす、ということで、4スロHaltech制御の導入を予定しています。
せっかくフルコンを入れるなら、なんかいろいろデータ見れるようにしたいな?という素人考えから、Haltechから各種データを取得する方法を模索していきます。
スマホでデータを表示したい
現在、運転中はスマホをディスプレイオーディオにつないで、Android Autoを利用しています。ディスプレイオーディオは無線に非対応なので、有線で接続。
このスマホが遊んでしまっている状態なので、スマホホルダーを取り付けて、スマホでデータを見れるようにしたい。
上記を踏まえると、「無線でデータを飛ばせる」「スマホのダッシュボード系アプリで表示できる」というのが条件になりそうです。
となると、真っ先に思い浮かぶのは、BluetoothでOBD2を飛ばす手法です。
事例を探す
HaltechからOBD2のデータを取得する事例を探してみると、インパクト!さんの記事がたくさん出てきます。ありがたい…。
『レアな、、、ワークスR入庫と、、ハルテックからOBD2出力ね。』

『ロータス・エキシージエンジン製作、強化ハルテックのOBD2出力機能(^^)』

どうやらHaltech Elite 1500や2500は、CAN系統が下記の2つあるようです。
- メインコネクタ(26pinのほう)
- AUXコネクタ
AUXコネクタを使う場合は、専用のハーネスを使えば一発でOBD2のデータを取得できるようです。
ただ、AUXコネクタを使う場合は、USBコネクタなどを保護するカバーを外した状態で運用しないといけない…
メインコネクタからもCANが使えるなら、カバーを外さなくて済むメインコネクタからOBD2を取得したい!(謎のこだわり)
というのと、メインコネクタを使った事例が見当たらなかったので、人柱も兼ねてメインコネクタからOBD2を取得し、Bluetoothで飛ばしてみる方法にトライすることに。
構成を固める
流れとしては下記のような感じになります。
- HaltechのメインコネクタからCAN HiとCAN Loを取り出す
- CAN HiとCAN Loから、OBD2のデータを読み取る
- OBD2のデータをBluetoothで飛ばす
手元に現物がないので想像ですが、Haltech側でCANに流すプロトコルにOBD2を指定できるようなので、CANからデータを読み取るのは簡単なんじゃないかなぁ…頑張って解析する必要はないはず…。
上記を手っ取り早く実現できるマイコンとして、ESP32を選択しました。
- CANコントローラを内蔵している
- Bluetoothも内蔵している
- 入手が楽ちん
ただ、Haltechからのメインコネクタから取り出したCAN Hi/LoをESP32に接続するには、CANトランシーバが必要です。
一般的にはTJA1050が使われることが多いっぽいのですが、ESP32は3.3V駆動であるのに対し、TJA1050は5V駆動。レベルシフタを入れるのもなぁ…と思っていたところ、SN65HVD230というチップが3.3V駆動ということで、これをトランシーバに採用することにしました。

というわけで、 Haltech→SN65HVD230→ESP32→スマホ という構成が固まりました。
まずはESP32→スマホの部分をつくる
構成が固まったとはいっても、手元にHaltechがあるわけではないw ので、実装に差し掛かるのは無理。
なのですが、ESP32からBluetoothでデータを飛ばし、スマホで表示できるのか、という部分は確認できるので、まずはそこから確認していくことに。やっと記事の本題に突入しました!
スマホでOBD2を表示する系のアプリでよく併用されるデバイスが、ELM327というやつ。OBD2のコネクタに接続するだけで、Bluetoothでデータを飛ばしてくれる便利なやつです。Amazonでも1000円くらいで買えます。

前述のAUXコネクタからハーネスを使ってOBD2を取る場合は、これが使えるわけですね。
なので、今回はこのチップの動きをESP32でそのままエミュレートしてやればいいわけです。
ESP32でELM327をエミュレートする
ELM327をエミュレートするということは、下記の機能をESP32で実装するということになります。
- OBD2のコマンドを適切に送受信できる
- シリアル通信をBluetoothで行う
このうち、Bluetoothの部分は非常に簡単で、 BluetoothSerial というESP32のライブラリを使うだけでOK。 Serial が SerialBT になるイメージです。
#include "BluetoothSerial.h"
BluetoothSerial SerialBT;
void setup() {
Serial.begin(115200);
SerialBT.begin("ESP32_Master", true); // true: マスターとして動作
Serial.println("Bluetooth Master Mode Started");
if (SerialBT.connect("Slave_Device_Name")) { // ペアリングしたいデバイスの名前
Serial.println("Connected to slave!");
} else {
Serial.println("Failed to connect.");
}
}
void loop() {
if (SerialBT.connected()) {
SerialBT.println("Hello from Master!");
delay(1000);
}
}#include "BluetoothSerial.h"
BluetoothSerial SerialBT;
void setup() {
Serial.begin(115200);
SerialBT.begin("ESP32_Master", true); // true: マスターとして動作
Serial.println("Bluetooth Master Mode Started");
if (SerialBT.connect("Slave_Device_Name")) { // ペアリングしたいデバイスの名前
Serial.println("Connected to slave!");
} else {
Serial.println("Failed to connect.");
}
}
void loop() {
if (SerialBT.connected()) {
SerialBT.println("Hello from Master!");
delay(1000);
}
}OBD2コマンドの送受信もそこまで複雑ではないです。基本的には、シリアル経由で送信されてきたコマンド文字列に対して、適切なレスポンスを返すだけ。
で、そのコマンドとレスポンスは下記のように規定されています。ATコマンドというのがELM327そのものの設定を確認・変更するコマンドで、01コマンドというのがOBD2のデータを取得するコマンドです。
- ATコマンド: OBD2/src/main/java/io/github/macfja/obd2/elm327/command/Commands.md at master · MacFJA/OBD2
- 01コマンド: OBD-II PIDs - Wikipedia
ATコマンドも01コマンドもすべて実装する必要はないので、必要なものだけ実装していきます。
というわけでいきなりですが実装したコードが以下。モックなので、取得できる値は項目含め適当です。
改めてOBD2のPIDを調べていて知ったのですが、油圧に対するPIDが存在しないのはちょっと驚きました。上記コードでは、通常のOBD2のPID範囲外である 01C9 というPIDを追加して、油圧を返すようにしています。
スマホでデータを表示する
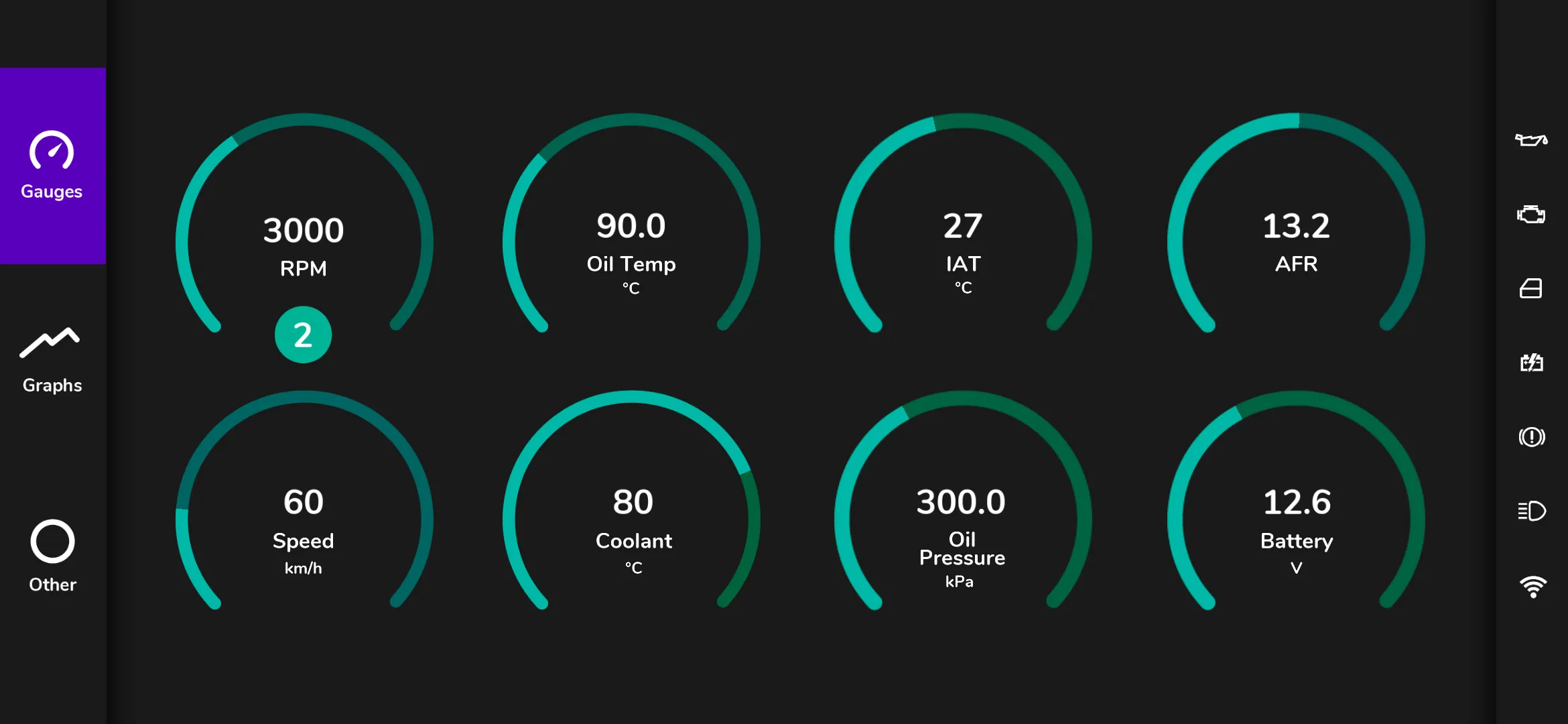
ESP32のコードが書けたので、あとはスマホでデータを表示するだけです。今回はRealDashを使って表示します。
注意点として、RealDashにデフォルトで用意されているOBD2のデータマップには、AFRや油圧といった項目が含まれていませんでした。なので、XMLにマップを追加する必要があります。
以下がAFRと油圧をOBD2経由で取得できるようにしたXMLです。targetIdなどはOBD2ではない接続方式のXMLを参考にして指定しています。
ESP32とスマホをペアリングして、RealDashでOBD2の接続先としてESP32を選択し、XMLを読み込むと…
無事データが表示されました!!
安定稼働するかな〜というのが心配だったので、実際に車載して運転してみましたが、特に接続が切れることなく、データが表示されていました。
ESP32の動作温度範囲的には、夏場も大丈夫…なはず…!
宿題
さて、データは取得できるようになったのですが、宿題がひとつ。それは、Torque Proでは接続がうまくいかないということ。
GitHubに置いている実際のコードを見てもらうとわかるのですが、09コマンドというコマンドも実装しています。これは、車両情報などを取得するコマンドのようで、Torque Proではこのコマンドで取得できる値も見ている模様。
見様見真似で実装してみましたが、Torque Proでは接続がうまくいかない…。
プロトコル選定がうまく行っていないようなので、プロトコル種別に関する実装も厚くしているのですが、ダメ。
自分の用途ではRealDashが動けばそれでいいのですが、時間があるときにTorque Proでも動くようにしておきたいところ。
まとめ
というわけで、今回は全構成のうち、ESP32とスマホの部分を実装しました。
Haltechをお迎えしたら、Haltech→ESP32の部分を実装して、実際に車載してみたいと思います。